
英伟达All in的物理AI路线,居然是中国黑马提前一年就定义好了
英伟达All in的物理AI路线,居然是中国黑马提前一年就定义好了当全球具身智能行业还在争论技术路线时,一家中国公司已经率先定义并跑通了自己的答案。深度机智提出的「人类学习」路线——以人类数据为起点、动作建模为中心、机器人为 AI 而生——正在被英伟达、Physical Intelligence 等海外头部机构沿同一方向跟进。
来自主题: AI资讯
7782 点击 2026-06-27 11:26
 搜索
搜索
当全球具身智能行业还在争论技术路线时,一家中国公司已经率先定义并跑通了自己的答案。深度机智提出的「人类学习」路线——以人类数据为起点、动作建模为中心、机器人为 AI 而生——正在被英伟达、Physical Intelligence 等海外头部机构沿同一方向跟进。
今天凌晨,Physical Intelligence发布了全新的VLA模型π0.7,狠狠敲了世界模型一记闷棍。π0.7第一次在机器人领域证明了Compositional Generalization(组合泛化),且VLA。

导读:近日,位于中关村的深度机智全球首次使用全新范式——人类学习,在多个国际 Benchmark 上取得 SOTA,史无前例地使用全新架构(仅使用人类第一视角数据、零真机数据)击败 Physical Intelligence 和英伟达等头部巨头二十多个百分点,并在两会开幕首日被央视报道。

灵初智能选择了一条更为激进的技术路线:「人类中心(Human-Centric)」。他们自主研发了全球首个灵巧手真实世界数采引擎Psi-SynEngine。
具身智能通往通用性的征途,正被 “数据荒漠” 所阻隔。当模型在模拟器中刷出高分,却在现实复杂场景中频频 “炸机” 时,行业开始反思:我们喂给机器人的数据,是否真的包含人类操作的精髓?近日,深度机智在以人类第一视角为代表的真实情境数据,筑牢物理智能基座,解决具身智能通用性难题的道路上又有重要举措。
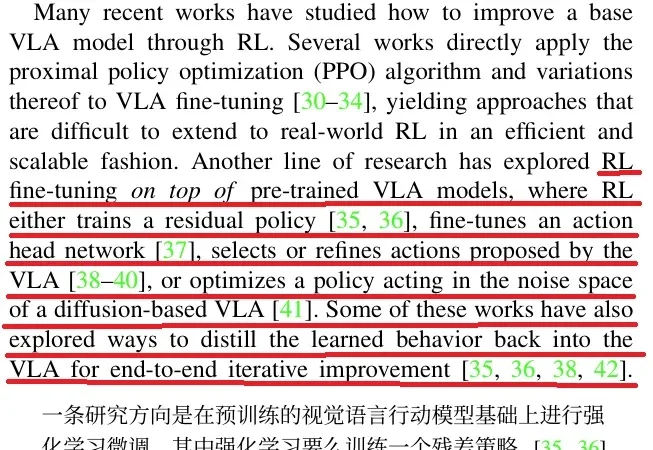
在 Physical Intelligence 最新的成果 π0.6 论文里,他们介绍了 π0.6 迭代式强化学习的思路来源:

本周,美国具身智能创业公司 Physical Intelligence(简称 PI 或 π)发布了旗下的最新机器人基础模型 π*0.6。PI 是一家总部位于旧金山的机器人与 AI 创业公司,其使命是将通用人工智能从数字世界带入物理世界:他们的首个机器人通用基础模型名为 π₀,让同一套软件控制多种物理平台执行各类任务。
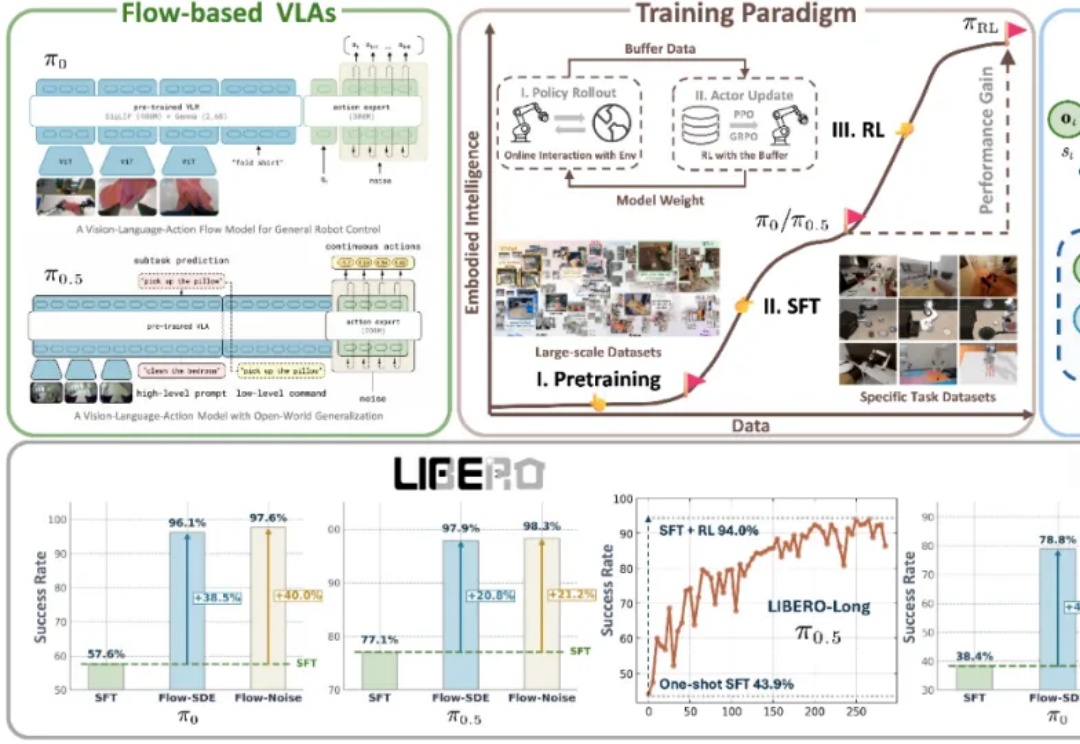
近年来,基于流匹配的 VLA 模型,特别是 Physical Intelligence 发布的 π0 和 π0.5,已经成为机器人领域备受关注的前沿技术路线。流匹配以极简方式建模多峰分布,能够生成高维且平滑的连续动作序列,在应对复杂操控任务时展现出显著优势。

这两天,Physical Intelligence(PI)联合创始人Chelsea Finn在𝕏上,对斯坦福课题组一项最新世界模型工作kuakua连续点赞。

今年,流匹配无疑是机器人学习领域的大热门:作为扩散模型的一种优雅的变体,流匹配凭借简单、好用的特点,成为了机器人底层操作策略的主流手段,并被广泛应用于先进的 VLA 模型之中 —— 无论是 Physical Intelligence 的 ,LeRobot 的 SmolVLA, 英伟达的 GR00T 和近期清华大学发布的 RDT2。